ACC自适应巡航控制系统介绍 |
您所在的位置:网站首页 › canon mf240 › ACC自适应巡航控制系统介绍 |
ACC自适应巡航控制系统介绍
|
本文是关于ACC自适应巡航控制系统的介绍,罗孚从个人视角出发,描述对ACC系统的理解,以及在一些使用场景下的思考。 什么是ACC? ACC系统是在定速巡航装置的基础上发展而来的,区别在于定速巡航只能限定速度,方向盘和刹车还需要驾驶员控制,而ACC能够较好的帮助驾驶员协调方向盘和刹车。定速巡航算是L1级别的自动驾驶,而ACC则可以算是L2级别的自动驾驶。 ACC主要有两个参数,车速和距离。如果“前面没车”,那么可以使用驾驶员设定的期望车速来行车,这与定速巡航功能相当,如果配合车道保持LKA系统,可以做到沿当前车道一直行驶。如果前车很慢而导致本车不可能用期望车速来行驶,那么ACC可以使得两车保持驾驶员设定的期望车距。在需要时,车辆会自动刹车和/或变速,以保持设置的车速或距离。在某些行驶状况下,还会要求驾驶员主动进行制动,这个警报信息会以声音和视觉方式显示出来。
ACC的使用方法 在介绍ACC原理之前,我们先来熟悉一下操作方法。 首先,打开ACC功能 ACC的所有操作功能都集成在了下图的拨杆上,把拨杆向司机方向拉动,即可开启ACC功能,把拨杆推回去则可以关闭ACC功能。
其次,设定期望车速 向上或向下推动操纵杆,可以提高或降低期望车速,车速可设置的范围一般为30~200Km/h,默认30Km/h开始,每推动一次,可以增加或减少10Km/h(有些步长是5Km/h),最后按下设置按键,即可保存车速,同时在仪表上也会显示设置的速度值。补充一下,对于全速ACC,则可以做到0Km/h起步,没有最低速度要求,这也是下文谈到的停停走走(Stop & Go)功能的基础。 再次,设定期望车距 本车和前车的车距,可以设置为4个等级,拨动滑动开关即可,默认车距为3级。需要注意,此处的车距不是一个固定的长度距离,而是一个恒定的时间间隔,最终的车距取决于前面设置的车速。原因在于,1到4级分别代表了不一样的响应时间,分别是1.0s、1.3s、1.8s和2.3s,实际上撞车的风险也是在于你的响应时间,很多事故及早响应都是能够避免的。车距设置的建议,一般在畅通的高速上,等级设高,因为车速较快,安全第一,而在市区道路,等级设低,车速不快,同时保持良好的停停走走体验。 最后,可以开始ACC了 除了以上三项设置外,还有行驶程序设置,即设置你的驾驶模式,有舒适、自动、运动、高效和个性化几种模式可供选择。当然还能设置提示音量大小。 当你的车速超过30Km/h时,ACC就自动启动了(全速ACC可以直接启动),他就会自动加速到你设定的车速(如果前方没有障碍物的话),然后在车速和车距上进行保持。
是不是马上就能获得舒适的开车体验了?是的,你可以把脚离开油门,甚至离开刹车都没问题。当然,离开方向盘不行,离开超过30秒会自动报警,毕竟不是自动驾驶,还是需要你来控制方向的。 除了这一些,还需要注意仪表上的显示,正常情况下绿色显示,在某些情况下,比如减速不能保持设定的车距,这时车辆就会发出警告,仪表会显示红色警告信息,同时会发出声音报警。 ACC原理 ACC功能主要利用了雷达技术,通过毫米波雷达,发射毫米波段的电磁波,利用障碍物反射波的时间差确定障碍物距离,利用反射波的频率偏移确定相对速度。毫米波雷达穿透雾、烟、灰尘的能力强,具有全天候(大雨天除外)全天时的优点。ACC一般使用的是77GHz的长距离雷达,距离可达100-200米。 ACC在技术实现上主要按以下四个步骤
第一步:距离测量 判断同前方车辆的距离,如果没有车辆(一般为毫米波雷达可探测的200米距离内),那么车辆就开始按照设定的速度行驶。 第二步:确定前车速度 确定前车速度的目的在于获得相对速度,通过第一步中的距离,可以推算出抵达前车所需要的时间,这个时间就可以和ACC设定的期望车距进行比较了。(什么?时间和距离进行比较?没错,这里和上文的ACC设置期望车距相呼应,期望车距实际是响应时间) 第三步:确定前车位置 毫米波雷达的视场角虽然较小,但探测130米开外的物体,那探测宽度就可能超过三根车道,加上弯道等情况,雷达会判断到前方多辆不同位置的车。 第四步:确定针对哪辆车来进行调节 前一步是确定车辆和位置,这一步就需要确定跟随车辆,这是一个重要的判断决策,也是ACC安全保障的关键,需要协调车内其他控制单元一起来判断,比如车道识别单元。另外,本处的调节,不仅仅是油门刹车这么简单,有更多的传感器单元参与其中,比如转向角、车轮转速等传感器。
ACC附加功能 ACC的附加功能比较多,如变道辅助、超车辅助、弯道辅助、停停走走等功能,这里只介绍一个非常有用的功能,就是停停走走,英文是Stop & Go。当然,不是所有具有ACC功能的车都配备了停停走走功能,还是有不少品牌车辆是不具备该功能的。 如果ACC的跟车功能主要用于高速公路驾驶,那么ACC下的停停走走主要用于市区道路。简单的来说,停停走走功能依然是跟随前方车辆,但前方车辆停下的时候,ACC车辆也会停下,前方车辆再次前进,ACC车辆也会自动加速。停停走走可以非常好的解决了跟车堵车或等红绿灯的问题,缓解了市区复杂环境下开车疲劳问题,是女司机的福音:)
停停走走功能也是有弊端的,一方面在停住前的2-3米,车辆是以2Km/h的速度爬行过去的,另一方面停车的车距在3.5-4米之间。这些弊端可能是出于安全考虑,而且国外行车环境也许相对文明,放在加塞抢道严重的国内环境,恐怕不知道被抢道超车多少次了,这种情况下走走停停的感受应该会很差吧。除了距离因素,还有时间因素,自动启动是在3秒后生效,对于拥堵的情况,多停3秒,给旁边的车辆增加了加塞的机会,也加剧了碰撞的风险。 ACC的优势和问题 ACC开发的初衷就是缓解疲劳,提高驾驶舒适度,这是毋庸置疑的优势。ACC也是自动驾驶前的初级功能,结合车道保持LKA、前向碰撞预警FCW、自动紧急制动AEB、变道辅助等系统,可以获得半自动驾驶的良好体验。ACC不仅仅用于高速环境,其走走停停功能更能用于市区拥堵环境,使用环境更广泛,辅助人类驾驶的作用更为突出。 虽然ACC功能非常强大,但也存在劣势。我们列举一些常见的问题。 ACC能跟车转弯吗? 大部分情况应该是无法跟车转弯的,90度弯和急弯应该都是过不了的,一方面雷达探测自身的局限性,另一方面在路口没有车道线,其车道保持功能也无法起作用。对于缓拐(如下匝道岔路口)和弯道(如高速小弯),ACC(实际上是车道保持系统)可以完成小幅度的拐弯,但对于稍大的弯,车辆就有可能判断错车辆而出现短暂急加速或急减速的情况。所以不要指望ACC能像车队自驾一样跟车,只要能完成高速跟车和市区堵车跟车就已经非常了不起了,对于拐弯的情况,还是自己多多把控吧。
ACC能识别摩托或行人吗? 如果在市区停停走走时,遇到加塞,即便碰了,那也是车车事故,那如果遇到行人或摩托呢?好问题,罗孚至今也没有明白,据说这又属于行人识别和行人保护两个功能,行人识别是只识别不减速,行人保护是识别并刹车,这两个功能是在ACC功能之外的,仅仅ACC的话,是无法识别行人的。对于市区环境,行人乱穿马路、电动车骑到机动车道等情况时有发生,使用ACC时还是多注意刹车吧。 ACC安全吗? 这是一个中立的问题,回答也是中立的,正是因为安全,所以车企才会将此功能开放给客户,但又是不安全的,不安全的因素也很多,如恶劣天气、加塞判断不够灵敏、刹车不够及时或力度、前方挂车异行物体判断错误等,同时更有驾驶员自身因素,使用ACC时没有保持警惕,甚至忽略了ACC的报警等。总的来说,建议在路况良好的情况下使用ACC,享受舒适的同时保持警惕,右脚依然不能离开刹车,该刹车时还是要自己主动刹车,这才是ACC正确的使用姿势:) 
原文标题:ACC自适应巡航控制系统介绍 文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。 收藏 人收藏扫一扫,分享给好友 复制链接分享 评论发布评论请先 登录 相关推荐 传统ACC控制系统和RIDIC系统对比分析哪个好? 传统ACC控制系统和RIDIC系统对比分析哪个好? 发表于 10-22 07:31 • 147次 阅读 巡航控制系统具有哪些功能优点?使用的注意事项有哪些? 巡航控制系统具有什么功能? 巡航控制系统的优点有哪些? 巡航控制系统由那几部分组成? 巡航控制系统使用的注意事项有哪些? ... 发表于 05-13 06:16 • 327次 阅读 一文读懂自动驾驶从L0到L5级的分级 相信在自动驾驶技术的辅助下,无人驾驶也终将真正意义上会实现,从而改变我们人类的生活方式。 基于ZU+的外挂8颗DDR4的设计案例分析
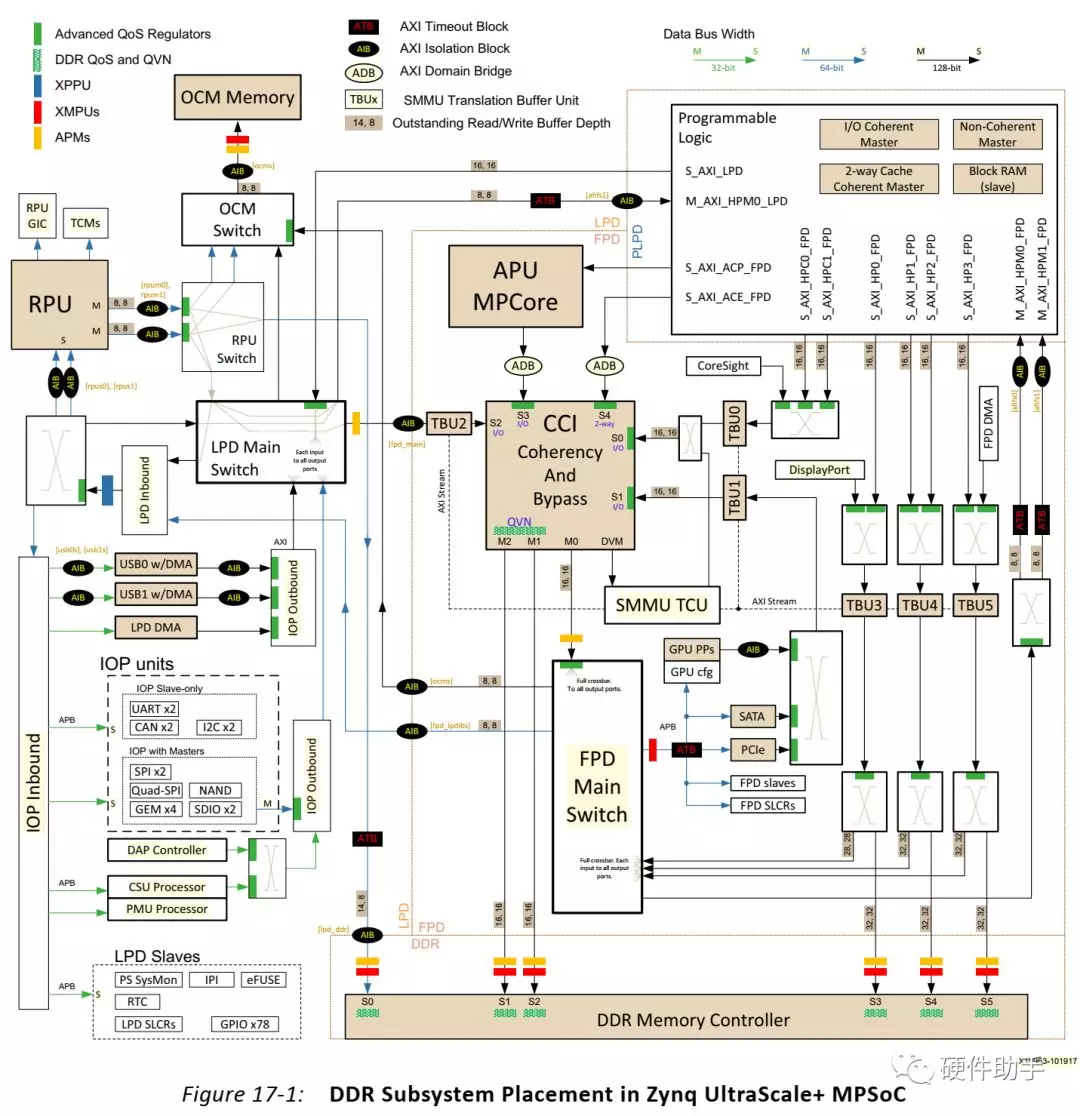
本篇主要针对Zynq UltraScale + MPSoC的DDR接口,从硬件设计的角度进行详细介绍....
基于ZU+的外挂8颗DDR4的设计案例分析
本篇主要针对Zynq UltraScale + MPSoC的DDR接口,从硬件设计的角度进行详细介绍....
 ACC自适应巡航系统,到底有多实用
在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,同时轮速传感器采集车速信号....
ACC自适应巡航系统,到底有多实用
在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,同时轮速传感器采集车速信号....
 自动驾驶汽车中的L2和L3级有什么不同
自动驾驶是如今汽车界的热门话题,除了最先启动自动驾驶时代的特斯拉,如今众多车企都开始涉足该领域,经常....
发表于 09-01 09:15 •
21065次
阅读
自动驾驶时代的前夜 巡航功能技术的变迁
实现 ACC 功能最关键的是雷达传感器。系统开启后,雷达对前车最远的探测距离可以达到 200 米,一....
发表于 08-18 11:00 •
1366次
阅读
干货 | 关于单片机上for循环中运用ACC的隐蔽错误
想到了这个方法后,觉得自己好白痴,以后都不用ACC了。
自动驾驶汽车中的L2和L3级有什么不同
自动驾驶是如今汽车界的热门话题,除了最先启动自动驾驶时代的特斯拉,如今众多车企都开始涉足该领域,经常....
发表于 09-01 09:15 •
21065次
阅读
自动驾驶时代的前夜 巡航功能技术的变迁
实现 ACC 功能最关键的是雷达传感器。系统开启后,雷达对前车最远的探测距离可以达到 200 米,一....
发表于 08-18 11:00 •
1366次
阅读
干货 | 关于单片机上for循环中运用ACC的隐蔽错误
想到了这个方法后,觉得自己好白痴,以后都不用ACC了。
 蓝牙编码格式简介
以下当前较为常用的几种蓝牙音频传输格式和支持厂商。下面按照编码的码率由低到高列举。
蓝牙编码格式简介
以下当前较为常用的几种蓝牙音频传输格式和支持厂商。下面按照编码的码率由低到高列举。
 ACC-65E通用数字输入输出卡的用户手册免费下载
accessory6E(ACC-65E)是一种通用的数字输入输出卡。它提供24个输入和24个输出的自....
发表于 11-05 08:00 •
822次
阅读
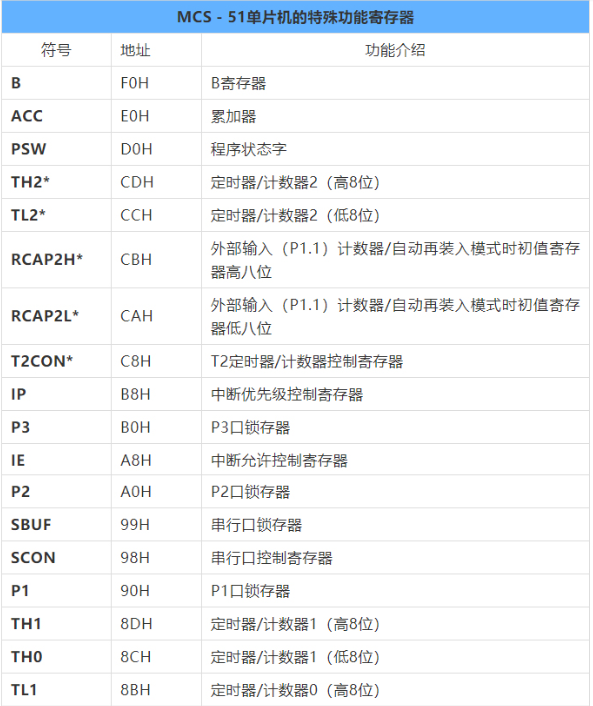
辅助特殊功能寄存器的地址详细资料免费下载
寄存器是中央处理器内的组成部分。寄存器是有限存贮容量的高速存贮部件,它们可用来暂存指令、数据和地址。....
发表于 10-22 08:00 •
500次
阅读
ACC自适应巡航技术——自动驾驶
现如今大家自驾长途越来越多,前不久我自己也跑了好几个长途,最多一天接近1000公里,这个时候如果没人....
ACC-65E通用数字输入输出卡的用户手册免费下载
accessory6E(ACC-65E)是一种通用的数字输入输出卡。它提供24个输入和24个输出的自....
发表于 11-05 08:00 •
822次
阅读
辅助特殊功能寄存器的地址详细资料免费下载
寄存器是中央处理器内的组成部分。寄存器是有限存贮容量的高速存贮部件,它们可用来暂存指令、数据和地址。....
发表于 10-22 08:00 •
500次
阅读
ACC自适应巡航技术——自动驾驶
现如今大家自驾长途越来越多,前不久我自己也跑了好几个长途,最多一天接近1000公里,这个时候如果没人....
 汽车电子的测试探讨
前提—S2最好能建立自已的测试标准,且基于该标准去测试其算法的性能、最终形成一份完整的性能报告,如果....
汽车电子的测试探讨
前提—S2最好能建立自已的测试标准,且基于该标准去测试其算法的性能、最终形成一份完整的性能报告,如果....
 深度解读之激光雷达技术以及其应用
“雷达”是一种利用电磁波探测目标位置的电子设备.电磁波其功能包括搜索目标和发现目标;测量其距离,速度....
深度解读之激光雷达技术以及其应用
“雷达”是一种利用电磁波探测目标位置的电子设备.电磁波其功能包括搜索目标和发现目标;测量其距离,速度....
 巡航控制系统的组成及其各组成相关知识详述
巡航控制系统由巡航控制开关、传感器、巡航控制ECU、执行器等组成。巡航控制开关和传感器将信号送至EC....
发表于 11-20 10:53 •
1883次
阅读
巡航控制系统的组成及其各组成相关知识详述
巡航控制系统由巡航控制开关、传感器、巡航控制ECU、执行器等组成。巡航控制开关和传感器将信号送至EC....
发表于 11-20 10:53 •
1883次
阅读
 汽车巡航控制系统的介绍
许多现代汽车上都装有巡航控制系统(Cruise Control System,CCS)o巡航控制系统....
发表于 11-20 10:51 •
669次
阅读
汽车“成像革命”的开始:备用摄像头开始风靡
2002年10月,Cameron Gulbransen被他的父亲Greg Gulbransen杀死。....
发表于 04-26 12:46 •
789次
阅读
汽车巡航控制系统的介绍
许多现代汽车上都装有巡航控制系统(Cruise Control System,CCS)o巡航控制系统....
发表于 11-20 10:51 •
669次
阅读
汽车“成像革命”的开始:备用摄像头开始风靡
2002年10月,Cameron Gulbransen被他的父亲Greg Gulbransen杀死。....
发表于 04-26 12:46 •
789次
阅读
 ADAS普及进行时,多平台支撑护航汽车驾驶
在过去的几年中,ADAS的市场已经开始蓬勃发展。目前,以舒适性为导向的系统(如ACC)主要应用在中级....
发表于 11-07 09:17 •
822次
阅读
雷达在汽车主动安全系统中的应用
汽车安全性能是汽车技术发展的一个重要课题。为了提高车辆的行车安全性能,各种先进技术被应用在汽车上。下....
发表于 12-04 14:27 •
2247次
阅读
ADAS普及进行时,多平台支撑护航汽车驾驶
在过去的几年中,ADAS的市场已经开始蓬勃发展。目前,以舒适性为导向的系统(如ACC)主要应用在中级....
发表于 11-07 09:17 •
822次
阅读
雷达在汽车主动安全系统中的应用
汽车安全性能是汽车技术发展的一个重要课题。为了提高车辆的行车安全性能,各种先进技术被应用在汽车上。下....
发表于 12-04 14:27 •
2247次
阅读
 ADAS:汽车控制领域未来发展趋势
从上世纪50年代早期的电动车窗到当今最新的汽车驾驶系统,豪华汽车所具有的高端特性随着时间的推移最终都....
发表于 11-07 08:59 •
1550次
阅读
浅析巡航控制系统
巡航控制系统是使汽车工作在发动机有利转带范围内,减轻驾驶员的驾驶操纵劳动强度,提高行驶舒适性的汽车自....
发表于 07-15 08:55 •
599次
阅读
Fast, Efficient and Predictabl
The influence of embedded systems is constantly....
发表于 07-21 15:08 •
491次
阅读
ADAS:汽车控制领域未来发展趋势
从上世纪50年代早期的电动车窗到当今最新的汽车驾驶系统,豪华汽车所具有的高端特性随着时间的推移最终都....
发表于 11-07 08:59 •
1550次
阅读
浅析巡航控制系统
巡航控制系统是使汽车工作在发动机有利转带范围内,减轻驾驶员的驾驶操纵劳动强度,提高行驶舒适性的汽车自....
发表于 07-15 08:55 •
599次
阅读
Fast, Efficient and Predictabl
The influence of embedded systems is constantly....
发表于 07-21 15:08 •
491次
阅读
 ACCP5.0教材下载
Accp5.0-strut、shibernate、spring、ajax ,ACCP5.0学习教材.....
发表于 10-02 00:54 •
1185次
阅读
ACCP5.0教材下载
Accp5.0-strut、shibernate、spring、ajax ,ACCP5.0学习教材.....
发表于 10-02 00:54 •
1185次
阅读
 ACC电路图
ACC电路图
发表于 01-01 05:35 •
7896次
阅读
ACC电路图
ACC电路图
发表于 01-01 05:35 •
7896次
阅读

|
【本文地址】
今日新闻 |
推荐新闻 |